Título:
Clasificación y modelado de entornos urbanos a partir de nubes de puntos para el diagnosis de la accesibilidad física y el cálculo de rutas para peatones
Autor: Jesús Balado-Frías
jbalado@uvigo.es
https://orcid.org/0000-0002-3758-3102
Universidad de lectura:
Universidade de Vigo
Departamento:
Departamento de Enxeñaría dos Recursos Naturais e Medio Ambiente
Programa de doctorado:
Xeotecnoloxías Aplicadas á Construción, Enerxía e Industria
Centro de lectura de la tesis: Escola de Enxeñaría de Minas e Enerxía
Fecha de lectura:
23.04.2019
Calificación:
Sobresaliente Cum Laude
Mención Europeo / Mención Internacional:
Mención internacional
Director/es de la Tesis y filiación:
Lucía Díaz Vilariño y Pedro Arias Sánchez
Tribunal y filiación de los miembros:
Presidente: Antonio Fernández Álvarez
Secretaria: María Flor Álvarez Taboada
Vocales: José Alberto Gonçalves
Identificador DOI:
http://hdl.handle.net/11093/1243
Enlace a documento de la Tesis completo en repositorio de la Universidad o Ficha Teseo:
http://www.investigo.biblioteca.uvigo.es/xmlui/handle/11093/1243
Resumen:
La movilidad en entornos urbanos aún supone un reto para la sociedad en la actualidad, a pesar de los grandes avances que se han realizado en los últimos años para mejorar la accesibilidad física. La complejidad de los elementos que componen el suelo urbano, sumada a necesidades específicas de los diversos perfiles motrices, hacen que algunas personas no puedan alcanzar sus destinos siguiendo una ruta directa y de forma fácil. Las personas con movilidad reducida son especialmente vulnerables a este problema, sus limitaciones a la hora de transitar por el suelo urbano los convierte en un colectivo en riesgo de exclusión social.
Una de las principales carencias en movilidad urbana para peatones puede verse en la ausencia de una herramienta efectiva capaz de generar rutas seguras y acorde con el perfil motriz de cada peatón. La información disponible sobre los elementos del suelo urbano, o su estado, es inexistente o está desactualizada. La tecnología LiDAR permite adquirir las zonas urbanas de una forma rápida y precisa, almacenando su geometría en nubes de puntos que después pueden ser procesadas. No obstante, las nubes de puntos son una fuente de información desordenada, con información redundante, oclusiones, donde la densidad de puntos no es uniforme y que, en la mayoría de los casos, tiene tal cantidad de información que las hace de difícil manejo y visualización.
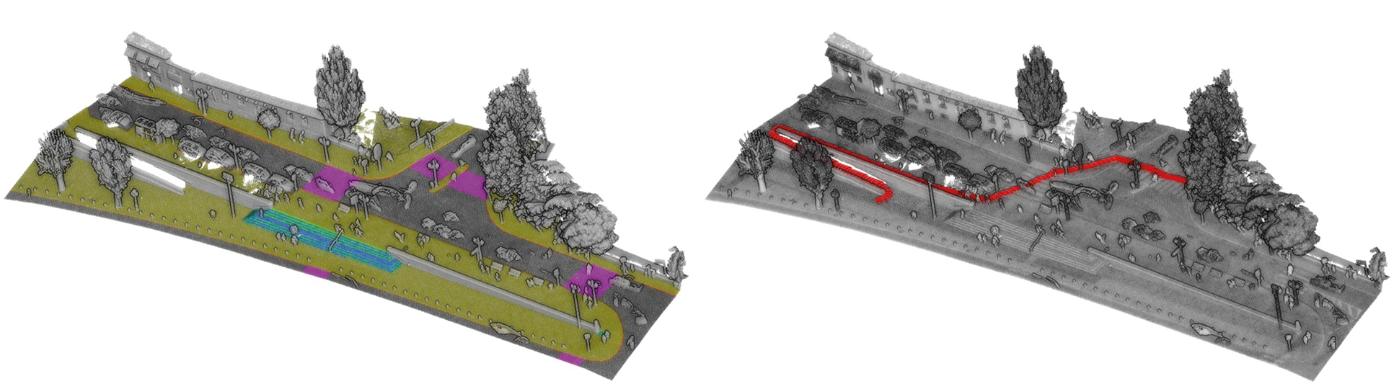
En esta tesis se presentan metodologías de procesamiento automático de nubes de puntos para interpretar el entorno urbano construido, centrándose especialmente en los elementos terrestres que conforman el espacio navegable. El objetivo principal es la generación de modelos urbanos para calcular rutas realistas para peatones de acuerdo con sus habilidades motoras. La información geométrica contenida en las nubes de puntos las hace una fuente de información óptima para este trabajo, a pesar de las limitaciones descritas en el párrafo anterior. Las nubes de puntos han sido clasificadas, en primer lugar, con el nivel de detalle más bajo posible para la detección de áreas urbanas mediante técnicas de inteligencia artificial y, en segundo lugar, con un alto nivel de detalle para la detección de elementos de suelo mediante información geométrica y topológica. El modelado ha tenido en cuenta los objetos dinámicos en la escena, corregido oclusiones y distribuido los nodos sobre el espacio del suelo, teniendo en cuenta la normativa de accesibilidad internacional ISO-21.542 y el entorno construido.
Los métodos diseñados han sido probados en nubes de puntos de las ciudades de Vigo y Ávila, obteniendo resultados que contribuyen a la solución del problema planteado. Los modelos generados han permitido la aplicación directa de el algoritmo Dijkstra. Las rutas generadas son seguras y coherentes con los elementos de suelo clasificados y los perfiles motrices, tienen en cuenta objetos estáticos, pero no dinámicos, y aseguran una superficie libre de paso mínima para que las personas se desplacen cómodamente.